PROJECTS












































PDF LittleDog Robot
System Overview
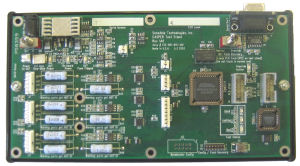
Boston Dynamics came to Bolton Engineering with a solid, well-planned specification and detailed mechanical requirements. Space was tight, but Bolton Engineering worked with the client to adapt the board size to make everything fit. The system was divided onto two boards: a Power Board and a Processor Board. The Power Board contained the several power supplies, twelve two-Amp Pulse-Width-Modulated (PWM) bi-directional motor controllers, motor current monitoring A/D converters, and battery protection circuitry.
The Processor Board included a large Intel/Altera Field Programmable Gate Array (FPGA), a Compact Flash interface, twelve joint encoder interfaces, forty-eight configurable analog inputs, sixteen analog outputs, four servo control outputs, and various programmable digital I/O. The PLD included a PCI interface as a high speed interface to the Single Board Computer. Power efficiency was a major design concern and a number of optimizations were an aim of increasing battery life. The Power Board worked the first time without requiring rework, and the Processor Board required only minor ECOs.
Project Scope
Boston Dynamics wrote the basic specification. Bolton Engineering worked with the client to make minor electrical and mechanical changes, designed the schematics, obtained vendor quotes, wrote and simulated Intel/Altera FPGA code, wrote diagnostic software under QNX, designed the 8-layer Power circuit board, designed the 10-layer Processor circuit board, debugged the system, and delivered twelve working prototypes.

Boston Dynamics' LittleDog is a quadruped robot used by researchers at leading institutions to study locomotion. LittleDog has four legs, each with three motors. The motors are strong enough for dynamic motion, including climbing. A Commercial-Off-The-Shelf (COTS) miniature PC-compatible Single Board Computer (SBC) observes a variety of sensors, controls robot movement and communicates to a base station via a high speed RF link. Sensors measure joint angle, body orientation, motor current, and foot contact. Researchers have full access to the robot hardware via a Boston Dynamics' API. Data may be logged either to the on-board Compact Flash Card, or to an FTP server via the RF link. On-board LiIon Polymer batteries support up to thirty minutes of continuous operation without recharging. LittleDog development was funded by the DARPA Information Processing Technology office.
Click here to see a video of LittleDog (8.5MB file)